Может быть обнаружен автомобиль стоимостью 100 000 юаней и понятен автомобиль стоимостью 1 миллион юаней; LiDAR также доступен в «бюджетной» и «флагманской» версиях.

Четыре-пять лет назад, когда технологии помощи водителю только зарождались, вся отрасль обсуждала вопрос «как транспортные средства должны видеть мир».
Одна из школ мысли выступает за «чисто визуальный» подход, полагая, что камер и алгоритмов достаточно для понимания окружающей среды и воспроизведения человеческого восприятия.
Другая школа мысли настаивает на объединении данных нескольких датчиков, утверждая, что без лидара не существует стабильной, точной и измеримой пространственной информации.

▲ FSD от Tesla твердо придерживается решения, основанного исключительно на машинном зрении
По сей день спор остается нерешенным, но рынок часто дает ответ быстрее, чем технические аргументы.
По мере постепенного внедрения передовых решений в области интеллектуального вождения LiDAR становится основным решением и стандартной конфигурацией для систем интеллектуального вождения.
По данным компании Gaogong Intelligent Vehicle, с января по июль 2025 года совокупные поставки новых автомобилей, оснащённых LiDAR, на китайский рынок (без учёта импорта и экспорта) достигли 1,0484 млн единиц, увеличившись на 69,73% по сравнению с аналогичным периодом предыдущего года. При этом доля автомобилей в стандартной комплектации для моделей стоимостью от 200 000 до 300 000 юаней достигла 30%.
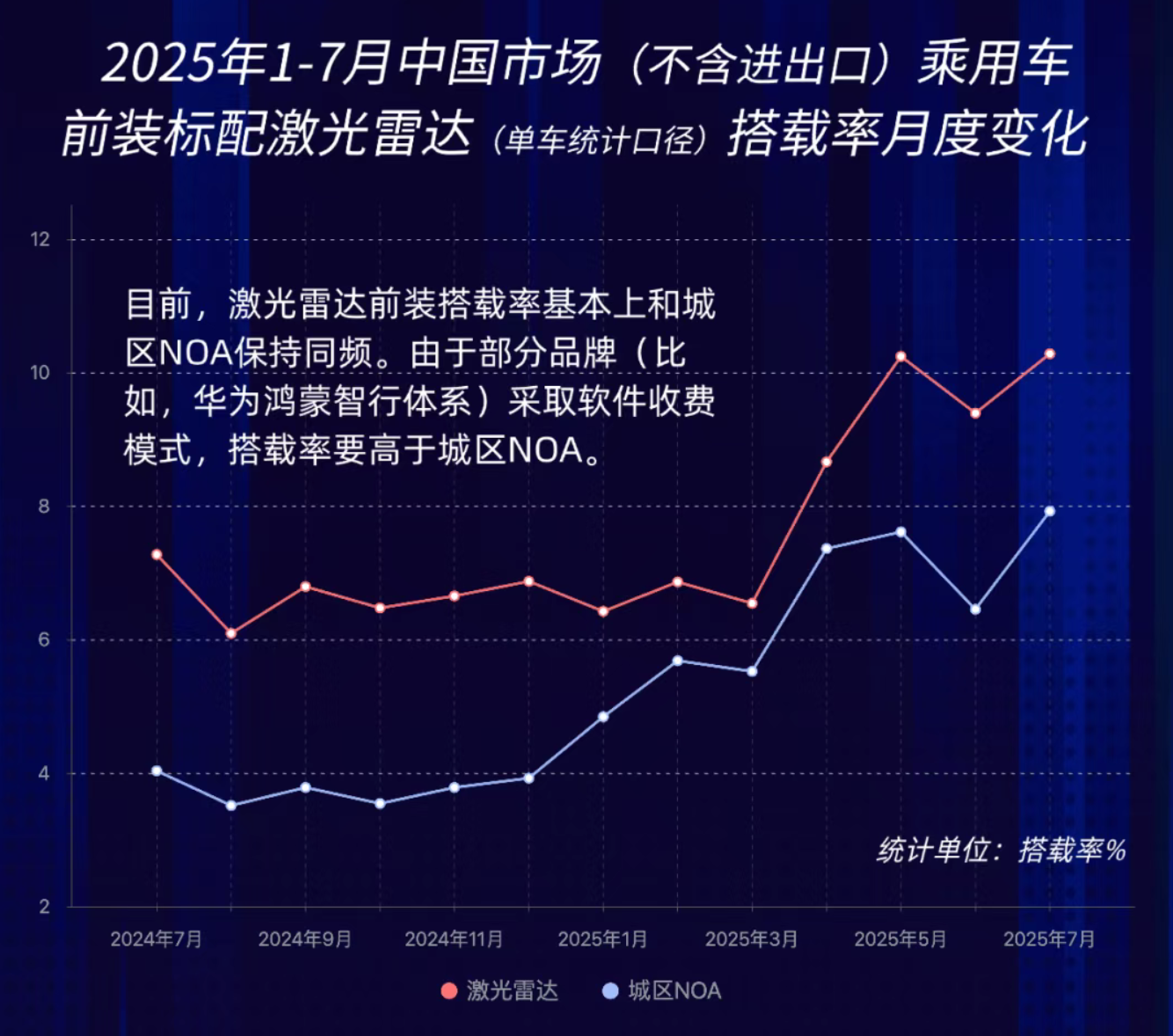
▲Графика от Gaogong Intelligent Vehicle
Более того, некоторые модели больше не довольствуются решением с одним радаром, чтобы улучшить возможности интеллектуального вождения. В моделях BYD Yangwang U7 и U8L используется решение с тремя лидарами, а в Zunjie S800, Xiangjie S9T и Wenjie M9 — с четырьмя. Недавно выпущенный Jike 9X даже использует конфигурацию из одного 520-линейных радаров дальнего радиуса действия и четырёх высокоточных твердотельных радаров, что обеспечивает полное лидарное покрытие на 360°.

▲ Zunjie S800 оснащен одним 192-линейным лидаром и тремя высокоточными твердотельными лидарами.
От «нужно ли устанавливать» до «сколько устанавливать»: роль лидара в системах помощи водителю становится все более важной.
Полутвердое тело: точка равновесия для массового производства
Однако сам лидар также имеет различные классы.
В последние два года на пресс-конференциях автопроизводителей мы все чаще слышим новый термин – «твердотельный LiDAR».
Термин «твердотельный» может быть несколько обманчивым. Он не означает, что в лидаре присутствует среда, подобная электролиту. Разница заключается в том, содержит ли структура лидара какие-либо «вращающиеся компоненты» в макроскопическом смысле.
Читатели, живущие в крупных городах, возможно, уже знакомы с тестовыми роботакси, такими как «Pony.ai» и «RoboCart». Эти машины часто имеют отличительную особенность — механический лидар, постоянно вращающийся на крыше.
Принцип его работы несложен. Вся оптомеханическая конструкция, оснащённая модулями лазерного излучения и приёма, непрерывно вращается на 360°, обеспечивая панорамный обзор окружающей среды.

Во время длившейся несколько лет волны испытаний Robotaxi этот тип радара оказался наиболее эффективным выбором: он мог захватывать данные облака точек со всех направлений одновременно, с большой дальностью действия (около 200 метров) и высокой точностью, что делало его «золотым стандартом» для систем восприятия.
Однако высокая производительность достигается за счёт высокой стоимости. Стоимость одного механического лидара часто составляет десятки тысяч юаней, а процесс его сборки сложен, что затрудняет массовое производство.
Кроме того, постоянное вращение конструкции оптического двигателя приводит к механическому износу, а двигатель и подшипники легко повреждаются и имеют короткий срок службы. Большие габариты и значительный вес также затрудняют установку в автомобиле, а также затрудняют соблюдение требований автомобильных стандартов по ударопрочности и стойкости к высоким температурам.

Именно полутвердотельная технология позволила LiDAR перейти от этапа тестирования к массовому производству.
Для выполнения точечного сканирования требуется всего несколько компонентов (например, отражатели и призмы), вместо вращения всего устройства, что обеспечивает баланс между производительностью, стоимостью и надёжностью. Конструкция более компактна и имеет более длительный срок службы, что упрощает интеграцию в крышу или решётку радиатора.
Полутвердые растворы представляют собой баланс, который автопроизводители нашли между производительностью, стоимостью и возможностью применения на автомобильном уровне, и теперь стали основным выбором для автомобилей массового производства.
По мере развития технологий стоимость полутвердотельных лидаров снижается год от года. В зависимости от характеристик лидара, текущая стоимость одного полутвердотельного лидара составляет от 1400 до 4000 юаней.
Однако, поскольку лишь некоторые компоненты способны двигаться, угол обнаружения полутвердотельного лидара относительно ограничен, обычно около 120° по горизонтали и 20° по вертикали. Поэтому автопроизводители обычно размещают его спереди автомобиля, а для заполнения слепых зон по бокам и сзади используют миллиметровые радары и камеры. Это также наиболее распространённое автомобильное сенсорное решение, встречающееся сегодня.

Если полутвердотельный LiDAR решил проблему «возможности установки в транспортные средства», то твердотельный LiDAR представляет собой будущее направление «полного устранения механических структур».
В нём нет движущихся частей, а сканирование осуществляется с помощью электрических сигналов. Это «чисто электронный» вариант лидара, использующий полупроводниковую технологию для излучения, сканирования и приёма луча.

▲Твердотельный лидар Hesai Technology FT120
В настоящее время существует два основных технических подхода к созданию полностью твердотельных лидаров: флэш-технология и оптический сенсор (OPA). Оптический сенсор (OPA) считается перспективным подходом на ближайшие 3–5 лет, в то время как решение на основе флэш-технологии является более зрелым, и большинство твердотельных лидаров, находящихся в массовом производстве, используют флэш-технологию.
Однако из-за ограничений в технологическом развитии дальность обнаружения твердотельного радара при отражательной способности 10% составляет всего 25–30 метров, что недостаточно для обнаружения впереди и обычно используется для контроля слепых зон по бокам и сзади транспортных средств.
Инженеры некоторых автопроизводителей также пошли на некоторые компромиссы в сценариях применения твердотельных LiDAR, например, увеличили вертикальный угол обнаружения до 75° или даже 90°, чтобы транспортные средства могли определять препятствия, расположенные близко к кузову и невысокие, например ступеньки, конусы и т. д.
В настоящее время технология твердотельных лидаров ещё не достигла полной зрелости: стоимость одного устройства составляет около 1500 юаней, что значительно превышает стоимость радаров и камер миллиметрового диапазона. Поэтому такие устройства в основном устанавливаются только на дорогих автомобилях.
Количество линий: разделительная линия между различными уровнями LiDAR (обнаружение и ранжирование света)
Помимо различий в структуре и форме, даже среди наиболее широко используемых полутвердотельных лидаров на самом деле имеются очень «строгие» различия в классе.
Как мы только что упомянули, в зависимости от характеристик радара стоимость одного полутвердотельного лидара в настоящее время колеблется приблизительно от 1400 до 4000 юаней.
При выборе LiDAR в отрасли наиболее часто упоминаемым техническим показателем является «количество линий».
Термин «количество линий» относится к количеству лазерных лучей, которые радар может одновременно передавать и принимать. Каждый лазерный луч сканирует окружающую среду и возвращает отраженный сигнал, формируя точку измерения дальности; все эти точки вместе составляют то, что мы обычно называем «облаком точек».
Чем больше линий, тем плотнее облако точек и тем четче видится мир для транспортного средства.
Можно представить это как обновление камеры мобильного телефона с «мегапикселей» до «сотен миллионов пикселей» — низкое количество линий похоже на фотографию с низким разрешением, на которой виден только контур; высокое количество линий похоже на изображение сверхвысокой четкости, на котором можно четко различить даже ресницы далеких людей.
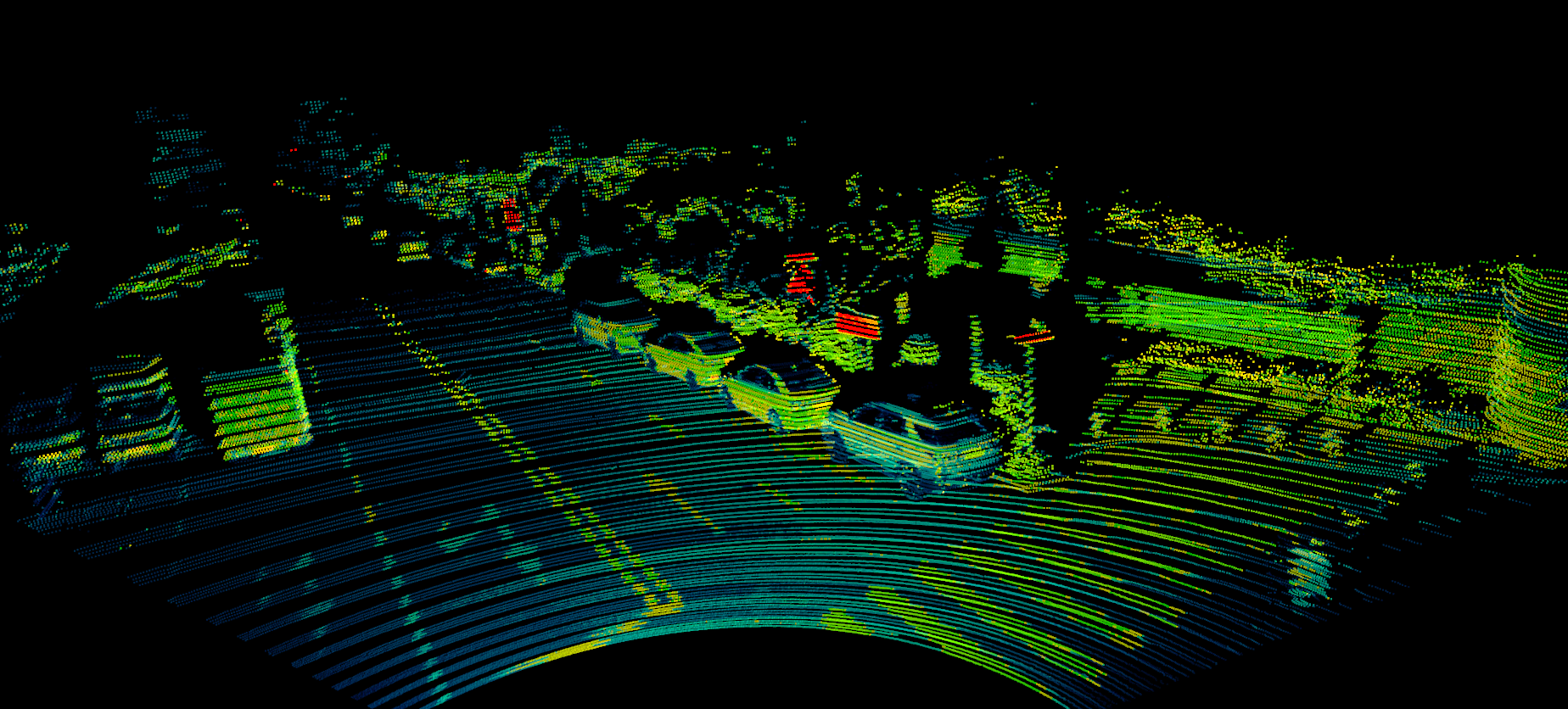
▲ 3D-карта облака точек
В классических механических радарах, таких как ранние 64-строчные модели, инженеры размещали 64 комплекта лазерных передатчиков и приёмников на круглой конструкции. Каждая пара модулей передатчика и приёмника фиксировалась под разным вертикальным углом, образуя вместе полную сканирующую решётку.
С наступлением эпохи полупроводниковых технологий вся отрасль начала переходить на интегрированные системы сканирования. Основная идея заключается в «повторном использовании» большего количества линий с использованием меньшего количества лазеров благодаря высокоскоростному механизму сканирования.
Это также привело к появлению отраслевой концепции: лидар будет иметь два технических показателя: фактическое количество линий и эквивалентное количество линий. Фактическое количество линий — это количество физически независимых каналов передачи/приёма; эквивалентное количество линий — это количество линий «визуального эффекта», формируемое технологией мультиплексирования сканирования. По производительности обработки данных лидар аналогичен высокочастотному радару, но по сути основан на высокочастотном сканировании и точной синхронизации.
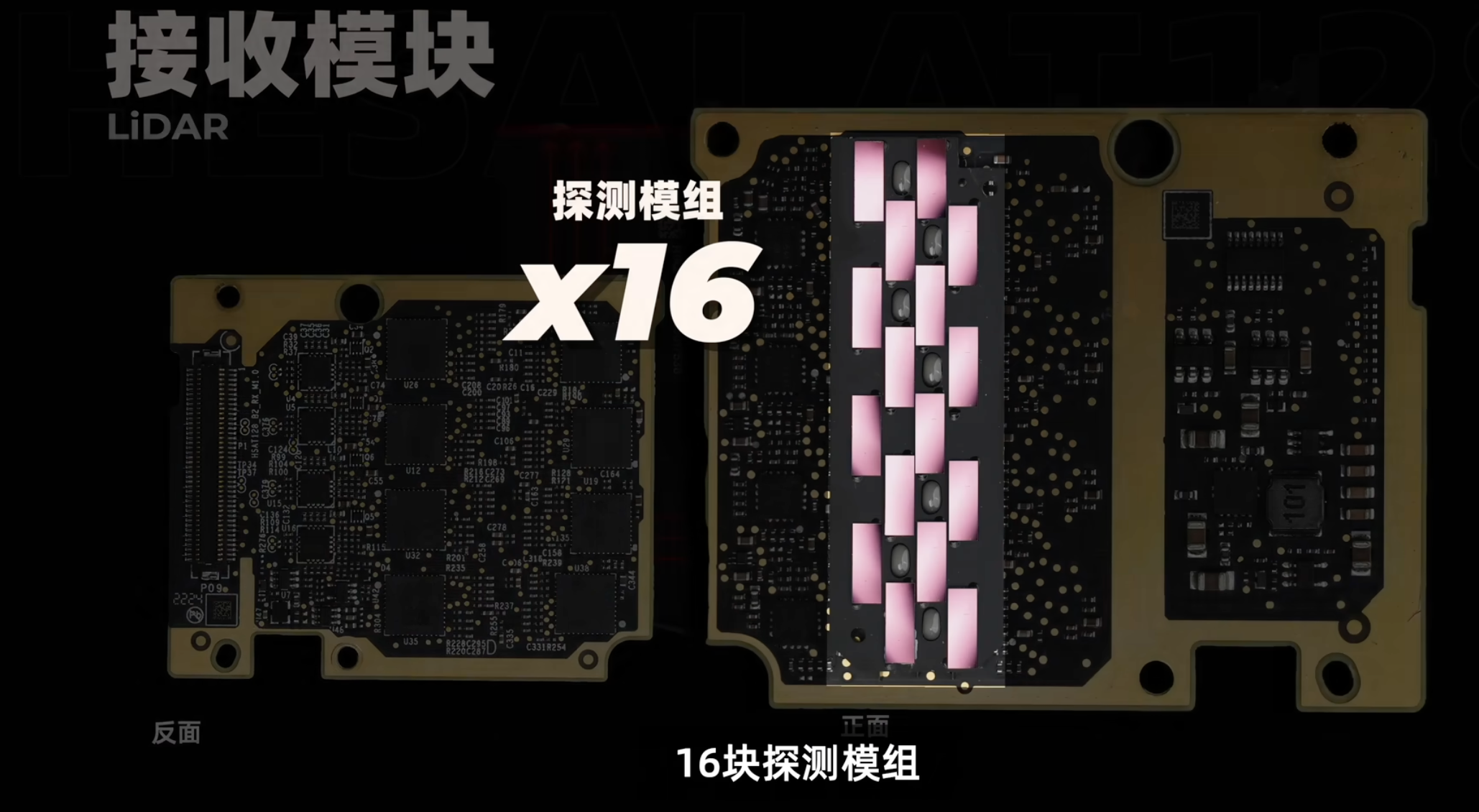
▲ Модуль обнаружения 128-строчного лидара Hesai, источник: Bilibili @GreenCoreChannel_ECC
Эту интегрированную систему сканирования, пожалуй, можно просто представить как аналог функции DLSS в видеокартах NVIDIA. Этот технологический подход делает автомобильные лидары реальностью и значительно снижает стоимость 128-, 300- и даже 500-строчных лидаров.
Так в чем же преимущества большого количества строк по сравнению с малым количеством строк?
В системе восприятия увеличение количества линий приводит не только к «большему количеству точек», но и к повышению качества облака точек и надежности системы.
Это похоже на наблюдение за объектом в густом тумане. Низкое количество линий (например, 16 линий) подобно нескольким редким фонарикам: лучи лишь изредка освещают отдельные участки, что затрудняет оценку всей картины объекта. В то же время высокое количество линий (например, 192 линии) подобно мощному прожектору, мгновенно освещающему всю сцену, позволяя с первого взгляда различить форму, положение и даже детали объекта.
▲ Карта облака точек 64-строчного твердотельного лидара
Например, на расстоянии 150 метров пешеход может оставить лишь 1-2 точки отражения в облаке точек 16-строчного радара. Алгоритм испытывает трудности с определением того, является ли это реальной целью или шумом, и существует высокая вероятность ошибочной оценки.
В облаке точек 128-строчного радара контур пешехода очерчивается десятком точек, и алгоритм может однозначно определить его форму и направление движения, что в несколько раз повышает уровень уверенности.
Например, 64-строчный радар может определить только, что объект находится спереди; 128-строчный радар может определить, что это «горизонтальный грузовик»; а 500-строчный радар может дополнительно определить, что «грузовик припаркован справа, а его задняя часть выдвинута на 30 сантиметров».
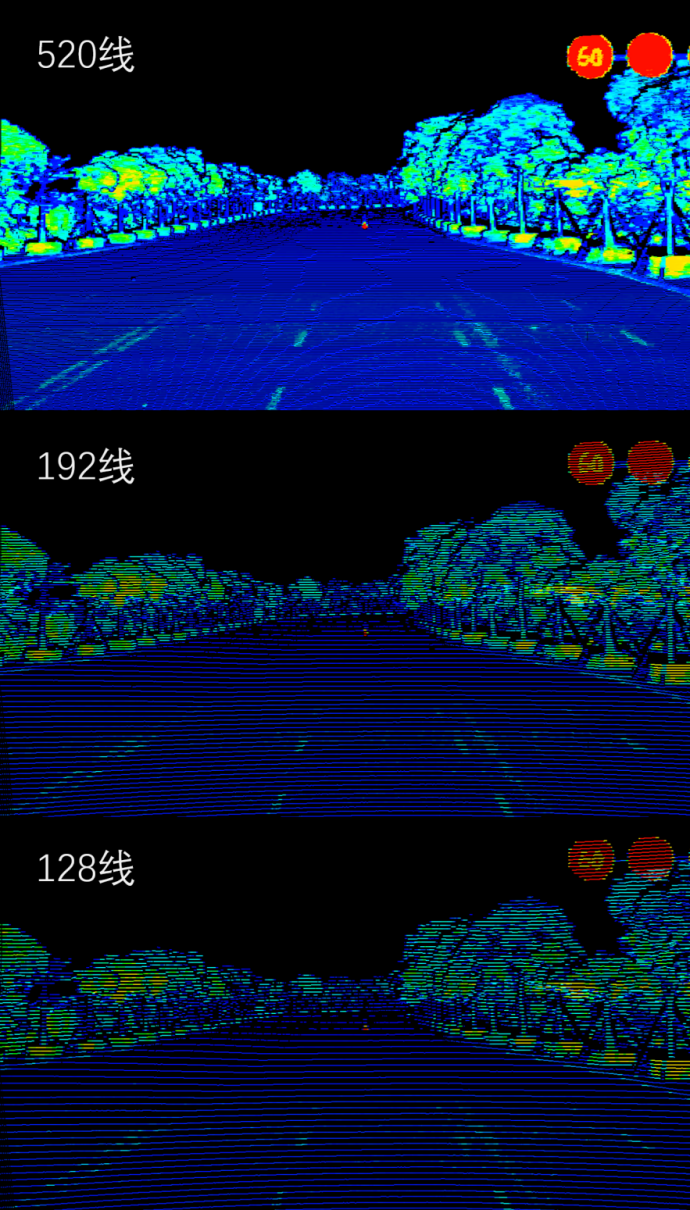
▲ Сравнение облаков точек, полученных с помощью лидара с разной шириной луча
Для систем автономного вождения эти едва заметные различия означают качественный сдвиг в восприятии: переход от «избегания объектов» к «пониманию обстановки».
Большее количество линий также означает скачок в дальности обнаружения. Дальность действия 64-строчного полутвердотельного лидара составляет около 150–200 метров, 128-строчного — около 200–250 метров, а 500-строчный лидар может увеличить дальность обнаружения до более 300 метров, что позволяет обнаруживать препятствия раньше и более своевременно.
Более того, в вертикальном угле радар с малым количеством линий обычно имеет вертикальное угловое разрешение более 0,5°, что означает, что земля и края дороги могут восприниматься на близком расстоянии как одна плоскость. Радар с большим количеством линий, напротив, может сжимать угловое разрешение до 0,1° или ниже, различая детали, где разница высот дорожного покрытия составляет всего несколько сантиметров, например, крышки люков, «лежачие полицейские» и невысокие препятствия.
Это не только повышает точность восприятия, но и делает планирование маршрута транспортного средства более плавным и безопасным.

▲ Высокоточный лидар может обнаруживать отрицательные препятствия.
Однако лидары дальнего света не лишены недостатков.
Помимо высокой стоимости, объём данных облака точек прямо пропорционален количеству линий. 128-линейный радар может генерировать в восемь раз больше точек данных в секунду, чем 16-линейный. Это создаёт серьёзную проблему для пропускной способности интерфейса передачи данных, вычислительной мощности основного управляющего чипа и вычислительной эффективности последующих алгоритмов восприятия. Если вычислительная платформа не справляется с нагрузкой, преимущество большого количества линий не будет реализовано, и это станет бременем для системы.
В настоящее время существует только один серийный автомобиль, оснащенный системой LiDAR с более чем 500 линиями — это JK9X, в котором используются два чипа NVIDIA Thor-U, а его стоимость начинается от 559 900 юаней.

▲ Сенсорное решение Krypton 9X
Однако вскоре мы можем увидеть ещё один автомобиль — Voyah Taishan, запуск которого ожидается в ноябре. Он будет оснащён системой интеллектуального вождения Huawei Qiankun ADS 4 Ultra. Благодаря дебюту лидара с разрешением более 500 линий, он может получить более заметное преимущество в области интеллектуального вождения по сравнению с Wenjie M9, оснащённым лидаром с разрешением 192 линии.

▲ Ланту Тайшань
Эволюция LiDAR — от вращения к стационарности, от точки к поверхности, а затем к расширению пространственных измерений — это, по сути, гонка за то, чтобы транспортные средства «видели яснее».
В ближайшие несколько лет, по мере того как твердотельные радары станут дешевле, а алгоритмы — мощнее, лидар может стать стандартной функцией каждого умного автомобиля, как подушки безопасности или камеры.
#Приглашаем вас следить за официальным публичным аккаунтом WeChat проекта iFaner: iFaner (WeChat ID: ifanr), где в ближайшее время вам будет представлен еще более интересный контент.
iFanr | Исходная ссылка · Просмотреть комментарии · Sina Weibo