Датчик размером с рисовое зернышко мог бы обеспечить роботам точную прикосновение и предотвратить поломку предметов.
Роботы невероятно точны, но бережное обращение не всегда является их сильной стороной. Машина, способная собрать автомобиль с почти идеальной точностью, все же может оказывать слишком большое давление при работе в местах, где даже малейшая ошибка имеет значение, например, внутри человеческого глаза или во время деликатной хирургической операции. Именно поэтому исследователи из Шанхайского университета Цзяотун разрабатывают новый тип датчика силы, который может помочь роботам более точно «чувствовать» то, к чему они прикасаются.
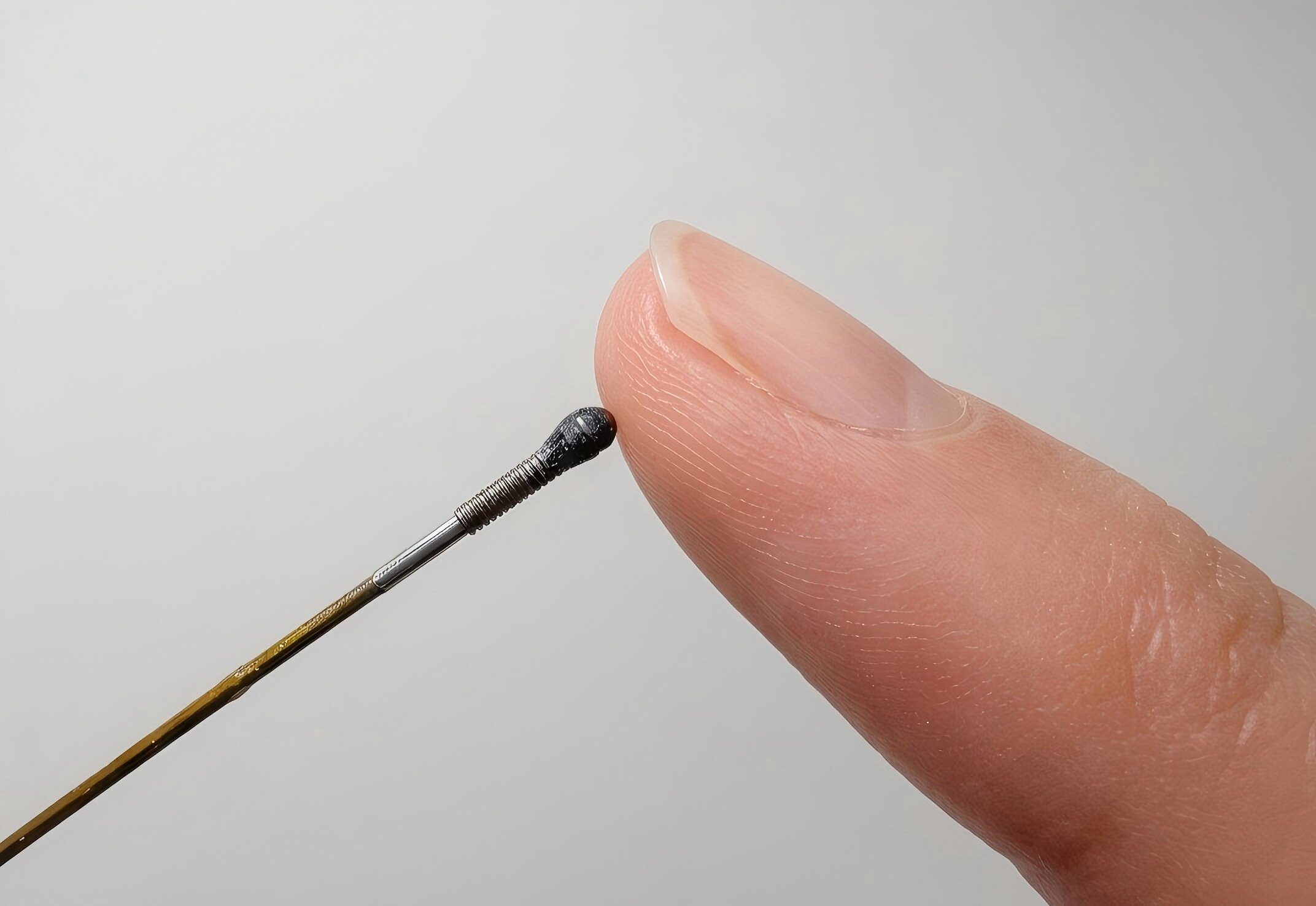
Датчик крошечный, размером примерно с рисовое зернышко, всего 1,7 миллиметра в ширину, что делает его достаточно малым, чтобы поместиться внутри современных хирургических инструментов. Особенно интересно то, что он не использует традиционную электронику. Вместо этого он использует свет для измерения силы во всех направлениях, включая давление, скользящие движения и скручивание. Вот как это работает. На конце оптического волокна находится мягкий материал, который слегка меняет форму при контакте с чем-либо. Эта крошечная деформация изменяет способ прохождения света через датчик. Измененный световой рисунок затем передается по оптическим волокнам на камеру, которая захватывает его в виде изображения. Затем исследователи используют модель машинного обучения для изучения этих световых рисунков и преобразования их в точные показания силы. Проще говоря, система учится «считывать» прикосновение только по свету, без необходимости в множестве проводов или нескольких отдельных датчиках, размещенных в таком крошечном пространстве.
Почему роботам нужно чувствовать, а не только видеть
Современная хирургическая визуализация уже невероятно развита. Сегодня хирурги могут видеть внутренние органы человека с впечатляющей четкостью. Но одна из трудностей, с которой они по-прежнему сталкиваются, особенно во время малоинвазивных процедур, — это ощущение того, чего касаются их инструменты. Хирург может четко видеть область на экране, но различение здоровой ткани от проблемной часто сводится к опыту и инстинкту, а не к обратной связи от самого инструмента.
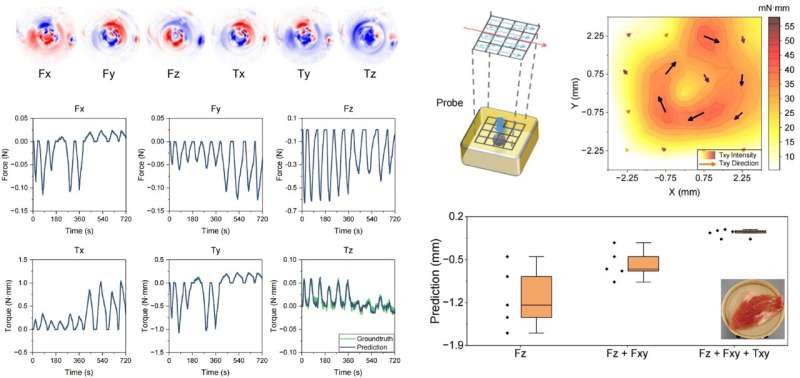
Именно эту проблему и пытается решить новый датчик. В ходе испытаний исследователи использовали его на мягком желатиновом блоке, под которым был спрятан небольшой твердый шарик, имитирующий опухоль в человеческой ткани. Датчик обнаружил скрытый объект, улавливая различия в жесткости при его перемещении по поверхности. В роботизированной хирургии, где врачи работают в крайне стесненных условиях и не всегда могут полагаться на прямой контакт, подобная тактильная обратная связь может сделать процедуры более безопасными, точными и значительно менее зависимыми от догадок.
Прежде чем это дойдёт до операционной, ещё предстоит проделать большую работу.
На данный момент эти результаты скорее доказывают работоспособность идеи, чем являются завершенным медицинским прорывом. Сами исследователи признают, что многое еще предстоит выяснить. Создание таких крошечных датчиков с неизменно высоким качеством в больших масштабах гораздо сложнее, чем создание единственной работающей версии в лаборатории. Процесс настройки также должен стать проще и надежнее, прежде чем его можно будет реально использовать в больницах. Кроме того, датчик еще не прошел долгосрочные стресс-тесты, необходимые для медицинских устройств, прежде чем врачи смогут доверять им во время реальных процедур.
Тем не менее, основная идея, лежащая в основе технологии, кажется действительно многообещающей. Вместо использования множества сложных датчиков, система использует гораздо более простую конструкцию, построенную на основе одного оптического канала и камеры. Такая упрощенная конструкция часто облегчает совершенствование и масштабирование технологий по мере развития инженерных решений. Сейчас команда работает над установкой датчика в реальные роботизированные хирургические инструменты и тестирует его в условиях, приближенных к реальным операционным. И хотя датчик размером с рисовое зернышко, способный «чувствовать», может показаться крошечной инновацией на бумаге, он может стать невероятно важным для хирургов, управляющих роботизированными инструментами в пространствах меньше ногтя.